
ساخت ژیروسکوپ مکانیکی
ساخت ژیروسکوپ مکانیکی
اختصاصی ساخته شده در کارگاه های گروه فنی مهندسی صنعت قطعه
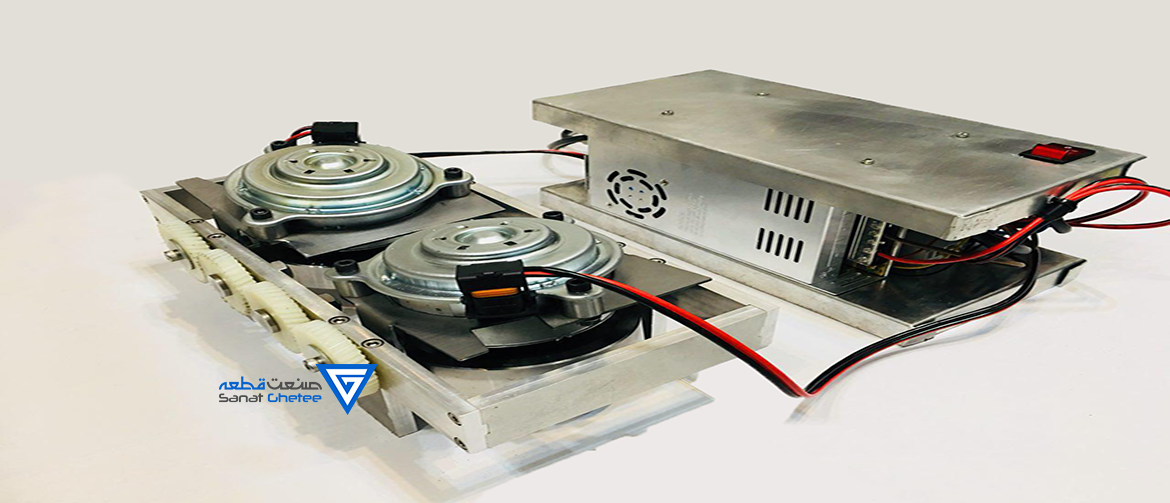
ژیروسکوپ فوق یک ژیروسکوپ تعادلی ، بنا به سفارش مشتری از مرحله طراحی تا ساخت توسط گروه فنی مهندسی صنعت قطعه طراحی، نمونه سازی و ساخت و تایید گردیده است.
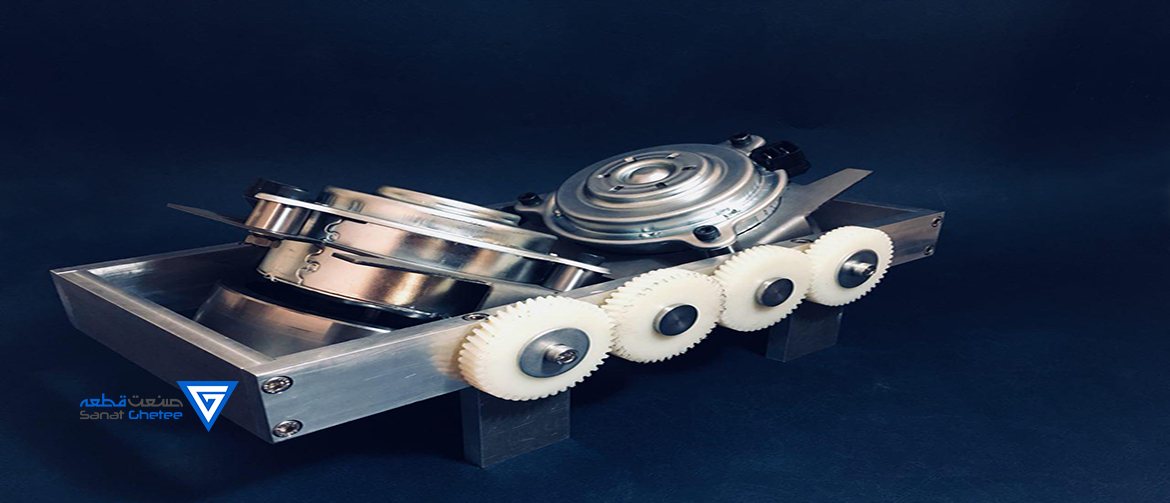
بدنه ژیروسکوپ مذکور به علت اهمیت وزن کلی دستگاه در طراحی از جنس آلومینیوم در نظر گرفته شده است. دیسک ها از جنس استیل و با کوچکترین تغییر وضعیت و زاویه دستگاه نیرو از طریق چرخدنده ها منتقل شده و دستگاه وظیفه حفظ تعادل را انجام می دهد.
دیسک های این دستگاه با توجه به نحوه طراحی مدار پشتیبان از لحاظ فنی قابلیت چرخش تا ۶۰۰۰ دور را دارا می باشند.
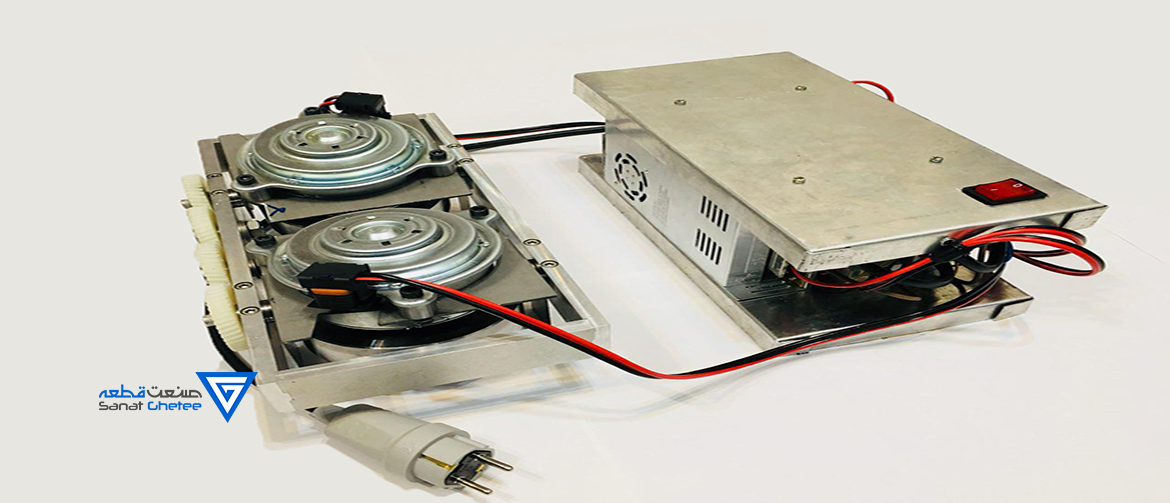
این ژیروسکوپ پس از ساخت، تست و تایید نهایی شده و به بهترین نحو بر روی سیستم مورد نظر نصب و عمل می نماید.
سفارش ساخت: گروه فنی مهندسی صنعت قطعه توانایی ساخت انواع ژیروسگوپ ها را دارد میتوانید جهت سفارش با شماره های درج شده در سایت تماس بگرید.
تاریخچه
کلمه ژیروسکوپ واژه ی یونانی است که از دو بخش جایرو به معنای دوران و اسکوپ به معنای نشان دادن است.به این ترتیب معنای تحت اللفظی آن دوران نمااست که بیان گر وظیفه آن نیز میباشد.نخستین پدیده ی ژیروسکوپی ،۱۲۵ سال قبل از میلاد حضرت مسیح توسط ایرخوس کشف شد.تا زمان نیوتن یعنی اواخر قرن ۱۷ میلادی،تنوع چندانی در این خصوص صورت نگرفت.اما در قرن ۱۸،برخی محققین مانند اولر،تحقیقات قابل ملاحظه ای در دینامیکی اجسام دوار صورت دادند.در همین قرن،در انگلستان درباره ایجاد یک افق مصنوعی برای کشتی ها،بررسیهایی عمل آمد.به این منظور از یک قرقره دوار استفاده شد که یک آینه مسطح مصنوعی برای کشتی ها،بررسی هایی عمل آمد. به این منظور از یک قرقره دوار استفاده شد که یک آینه مسطح عمود بر امتداد محور چرخش آن قرار داشت.
در اواسط قرن ۱۹،فوکو،دانشمند فرانسوی برای نشان دادن دوران زمین از یک ژیروسکوپ استفاده کرد که این ار بعلت نداشتن یک موتور الکتریکی مناسب ،به شکل دقیقی انجام نگرفت.همین دانشمند بود که برای نخستین بار در سال ۱۸۵۲ میلادی نام ژیروسکوپ را برای آن برگزید و در سال ۱۹۰۰ شخصی آلمانی به نام آنشوش کامف تصمیم به ساختن زیر دریایی برای کاوش در قطب شمال گرفت.اما وسایل هدایت و راهیابی دقیق برای این کار وجود نداشت.به ویژه قطب نماهای مغناطیسی در محدوده قطب شمال به دلیل وجود میدان های مغناطیسی قوی،از دقت و عملکرد صحیح می افتادند.از این رو تلاش کرد تا قطب نمای دیگری که مستقل از خواص مغناطیسی عمل کند بسازد . تلاش وی منجر به به ساخت قطب نمایی شد که بر اساس خواص ژیروسکوپی کار میکرد و آنرا قطب نما قطب نمای ژیروسکوپی نام نهادند.این قطب نما،در واقع نخستین وسیله دقیق هدایت و راه یابی است که بر اساس اصول اینرسی کار میکرد. پیشرفت صنعت و پدیدار شدن وسایل نقلیه فضایی،لزوم ابداع و هدایتو کنترل دقیق را بیش از پیش آشکار ساخت.به ویژه وقوع جنگ جهانی اول و دوم و تولید نسل های جدید انواع هواپیما و موشک ها،دانشمندان و محقیقین را به نحو بارزی بر آن داشت تا در زمینه ابداع وسایل دقیق تر و با کیفیت بالاتر تلاش بیشتری صورت دهند.قدم اساسیدراین زمینه طی جنگ جهانی دوم در دانشگاهام آی تی آمریکا برداشته شد که تحت سرپرستی شخصی به نام چارلز دراپر،ژیروسکوپ هایی دقیق و کوچک برای نصب روی هواپیما ساخته شد که بخاطر مین تلاشهایش او را آقای جایرو لقب نهادند.پس از جنگ جهانی دوم،روش هدایت و ناوبری اینرسی به عنوان روشی دقیق و قابل اعتماد برای هدایت وسایل فضایی ساخته شد.نخستین سامانه هدایت که بطور کامل بر مبنای اصول اینرسی توسط ژیروسکوپ ها و شتاب سنج ها عمل می کرد و در آن از یاتاقان های گازی برای تعلیق طوقه ها استفاده شده بود،در سال ۱۹۵۰مورد آژمایش پروازی قرار گرفت.امروزه نیز سامانه هدایت اینرسی ،بعنوان یکی از مهم ترین روشها برای هدایت و کنترل در امر هوانوردی و فضانوردی و همچنین هدایت هدایت موشک ها،کشتی ها و زیردریای ها بطور گسترده مورد استفاده قرار دارد و به تبع این امر،انواع مختلفی ازژیروسکوپ ها و شتاب سنج ها اختراع ششده اند که درین مقاله به آنها پرداخته خواهد شد.
ژیروسکوپ وسیله ای جهت اندازهگیری و یا حفظ جهت در راستای برقراری تعادل میباشد که از اصل بقای تکانه زاویهای استفاده میکند.یک ژیروسکوپ مکانیکی همیشه یک چرخ یا دیسک چرخنده با محور آزاد دارد که میتواند در هر جهتی بایستد. ژیروسکوپهای با تکنولوژی حالت جامد هم وجود دارند مانند ژیروسکوپهای حلقه لیزری.
کاربرد اصلی ژیروسکوپ حفظ تعادل می باشد همچنین دیگر کاربردها در همین راستا شامل هدایت زمانی که قطبهای مغناطیسی کار نمیکنند (مانند تلسکوپ هابل) و یا به اندازه کافی دقیق نیستند مثل ICBM و یا برای پایدارسازی ماشینهای پرنده مثل هلیکوپترهای هدایت شونده توسط رادیو و یا UAVها میباشد. به دلیل دقت بالاتر، ژیروسکوپها همچنین در حفظ جهت در معدن کاری تونلها هم به کار میروند. در تلفن های همراه نیز ژیروسکوپ کاربرد دارد وتحت عنوان چرخش خودکارصفحه (screen rotation) میتوان آن را فعال کرد.
ساختار و نحوه عملکرد ژیروسکوپ
از دوران کودکی به خاطر داریم که وقتی فرفره ی کوچکی را با کمک نیروی انگشتان خود می چرخانیم فرفره حول محورش و روی نوک تیز خود شروع به چرخش میکرد.بدون چرخش فرفره،امکان ایستادن فرفره روی نوکش وجود نداشت.در واقع چرخش فرفره حول محورش موجب پایداری و حفظ جهت فرفره میشد.این توضیح ساده مبنای کارکرد ژیروسکوپ های مکانیکی میباشد و از ان منظر،زمین نیز یک ژیروسکوپ است که به علت دوران ،محور خود را در فضا ثابت نگه میدارد.
طبق اصل بقای اندازه حرکت زاویه ای، هر جسم متقارن در حال چرخش سعی دارد جهت خود را همواره در فضا حفظ کند.از این رو اگر یک جسم متقارن را با دور بالا بچرخانیم و اطراف آنرا با یاتاقان و بلبرینگ آزاد بگذاریم که نیروهای خارجی بر آن اعمال نشود،یاچرخشقابی که جسم درون آن دوران میکند،جهت چرخش جسم دوار تغییر نمی کند،بنابراین میتوانیم با کمک این وسیله در اجسام متحرک جهت چرخش جسم دوار تغییر نمیکند،بنابراین میتوانیم با کمک این وسیله در اجسام متحرک جهت ثابتی داشته باشیم که وضعیت فعلی خود را درهر لحظه با آن مقایسه نماییم و لذا موقعیت زاویه ای و محاسبه سرعت تغییر سرعت زاویه ای را بدست آوریم.
عضو اصلی ژیروسکوپ های مکانیکی،یک دستگاه دوار یا روتور است که معمولا با سرعت زیاذ حول محور تقارن خود دوران میکند این سرعت از ۳۰۰۰تا ۳۰۰۰۰۰ دور در دقیقه می باشد لذا در اثر اینرسی جرم دوار،اندازه حرکت(ممنتوم)نشبتا بزرگی ایجاد میشود.اگر یاتاقان بندی محور چرخش را در طوقه ای معلق تعبیه کنیم به نحوی که گشتاور خارجی به آن وارد نشود،با وجود تمام حرکت های قاب،محور چرخش روتور همواره به جهت ثابتی اشاره میکند و موقعیت خود را در فضا حفظ میکند.با این روش میتوان جهت و یا محورهای ثابتی را برای وسیله نقلیه تعریف کرد که هرگونه حرکت زاویه ای نسبت به این محورها سنجیده شود.
در وسایل و سیستمهای مکانیکی یک ژیروسکوپ معمولی دارای ساختاری شامل یک روتور که برای چرخیدن به یک محور متصل شدهاست، ژورنالهای روتور بر روی یک حلقه یا حلقه داخلی نصب شده، و حلقه داخلی برای نوسان بر روی یک حلقه خارجی که خود برای نوسان نسبت به یک تکیه گاه وصل شدهاست نصب شدهاست. حلقه یا حلقه خارجی همچنین برای لولا بودن به دور یک محور که بر روی صفحه خودش که توسط تکیه گاه مشخص میشود نصب میگردد. حلقه خارجی یک درجه آزادی چرخش دارد و محورش هم هیچ آزادی ندارد. حلقه داخلی به طوری بر روی حلقه خارجی نصب میشود که بر روی یک محور در صفحه خودش که همیشه بر محور حلقه خارجی عمود است لولا میشود.
محور چرخ دوار محور چرخش را تعریف میکند. حلقه داخلی دو درجه آزادی چرخش دارد و محورش هم یک درجه آزادی دارد. روتور برای چرخش به محوری متصل است که همیشه به محور حلقه داخلی عمود است. بنابراین روتور سه درجه آزادی چرخش دارد و محورش هم دو درجه دارد. چرخ به نیروی وارد بر محور ورودی با نیروی عکس العمل به محور خروجی پاسخ میدهد.
رفتار یک ژیروسکوپ میتواند به سادگی با توجه به رفتار چرخ جلوی دوچرخه درک میشود. اگر چرخ از محور عمود به سمت چپ متمایل شود لبه جلوی چرخ هم به سمت چپ میچرخد. به عبارت دیگر چرخش بر روی یک مورد چرخ چرخان، چرخش در محور سوم را موجب میشود.
مثالی از وسایل با حلقه خارجی آزاد میتواند ژیروسکوپهای با مرجع جهت(attitude reference gyroscope) باشند که برای اندازه گیری زاویه در راستای سه محور مختصات (غلت و تاب و انحراف سمت) در یک فضاپیما و یا هواپیما مورد استفاده قرار میگیرند.
امروزه مهندسان مکانیک و الکترونیک توانسته اند به کمک تکنولوژی این فناوری که متشکل از یک چرخ نخ ریسی و حلقه است، در یک تراشه جا دهند و آن را به یک سیستم MEMS تبدیل کنند در نتیجه ژیروسکوپ را به یک ساختار ارتعاشی تبدیل کرده اند. این تراشه به این صورت عمل می کنند که با تغییر زاویه دستگاه، سیگنالی را دریافت می کنند و به سنسورها منتقل می کنند و سنسورها نیز پاسخ را به نرم افزار منعکس می کنند که در نتیجه، عملیات چرخش صورت می گیرد.
Gps، شتاب سنج و قطب نما همگی در گوشی های هوشمند امروزی به کار گرفته می شود، نیک بلک، مؤسس شرکت کلاودمید که سازنده سخت افزار و نرم افزارهای نقشه برداری و تشخیص موقعیت در این مورد می گوید: شتاب سنج تعیین می کند که گوشی در کدام جهت حرکت کرده است، اما قادر نیست تشخیص دهد که گوشی حول محور خود به کدام جهت چرخیده است. قطب نما تنها در جهت افقی تشخیص می دهد که وسیله به کدام جهت اشاره دارد، به این معنا که قادر به این که وسیله به سمت بالا یا پایین اشاره دارد نیست.
اگر یک تلفن هوشمند را مانند هواپیما در نظر یگیریم، تلفن هایی که مجهز به قطب نما هستند، قادر به تشخیص انحراف مسیر (تغییر مسیر) هستند اما تکان ها و ارتفاع را فقط ژیروسکوپ تشخیص می دهد.
امروزه در بسیاری از گوشی های هوشمند از این فناوری هم برای شتاب سنج و هم ژیروسکوپ استفاده می شود که در نتیجه ۶ محور برای انجام تغییر زاویه و چرخش وجود دارد که به راحتی تمامی حرکات را تشخیص می دهد. به همین دلیل امروزه بسیاری از کمپانی های تولید نرم افزار و بازی از این فناوری در ساخت اعمال حرکتی بازی یا نرم افزارها استفاده می کنند.
ساختمان اساسی انواع ژیروسکوپ
ژیروسکوپ از نظرساختمان به دو دسته یک درجه آژادی و دو درجه آزادی تقسیم میشود که درین تقسیم بندی ها،توانایی حرکت روتور نسبت به چارچوب یا بدنه ژیروسکوپ مورد نظر است.اگر روتور علاوه بر حرکت دورانی خود حول محور چرخش،بتواند حول یک محور دیگر دوران کند،به آن ژیروسکوپ یک درجه آزادی میکویند و چنان چه بتواند حول دو محور دیگر د.ران کند،به آن ژیروسکوپ دو درجه ای اطلاق میشود. درینجا به اختصار به معرفی هر یک ازین ژیروسکوپ ها می پردازیم.
ژیروسکوپ دو درجه آزادی
این ژیروسکوپ نخستین نوع ژیروسکوپ است و بیش تر در سامانه های کنترل آتش،وسایل کنترل موقعیت و قطب نماهای ژیروسکوپی از آن استفاده میشود.این نوع ژیروسکوپ را( ژیروسکوپ دو محوره)یا (ژیروسکوپ سه بدنه ای )نیز مینامند.این نوع ژیروسکوپ ،افزون بر محور چرخش روتور دارای دو محور دوران دیگر نیز میباشد که توسط دو عدد طوقه معلق درونی و بیرونی فراهم شده است و در حالت عادی محور چرخش و این دو نسبت به هم متعامد هستند.مجموعه طوقه داخل(که در واقعتکیه گاه چرخش را فراهم میکند)،محور چرخشو روتور را مجموعه دوار میگویند.تکیه گاه های طوقه داخلی در طوقه خارجی قرار دارد که میتواند در ان دوران کند.طوقه خارجی نیز به نوبه خود،درون تکیه گاه هایی قرار دارد که در بدنه ژیروسکوپ تعبیه شده و میتواند داخل آنها حرکت دورانی داشته باشد.برای اندازهگیری حرکت های محور چرخش حول دو محور طوقه داخلی و خارجی از نوع حس کننده-که در امتداد این محور ها سوار شدخ است-استفاده میشود.همچنین برای ایجاد حرکت های عمدی و مشخص و اندازه گیری شده محور رخش حول این دو محور،از وسایل محرکه مختلفی مانند مولد گشتاور استفاده میشود.
ژیروسکوپ یک درجه آزادی
ژیروسکوپ یک درجه آزادی،نوع تکمیل شده ژِیروسکوپ دو درجه آزادی بوده و پس از آن به وجود آمده است.درین نوع ژیروسکوپ،سه محور متعامد مشخص وجود دارد که عبارتند از محور ورودی(که بدنه حول آن دوران میکند)محورخروجی(که محور دوران طوقه نسبت به بدنه است)و محور چرخش در ابتدا این سه محور کاملا بر هم عمودند.روتور این نوع ژیروسکوپ،به جز حرکت حول چرخش،تنها میتواند حول یک امتداد دیگر یعنی امتداد محور طوقه داخلی،دوران نماید(نسبت به بدنه جایرو)ژیروسکوپ سک درجه آزادی را میتوان در حالت کلی به سه دسته تقسیم کرد:
ژیروسکوپ های سرعتی:درین نوع،عامل بازگرداندن طوقه مجموعه دوار به وضعیت اولیه،سک نصر الاستیک مانند فنر است و برای تعیین سرعت زاویه ای وسیله نقلیه ای-که ژیروسکوپ روی آن سوار شده-بکار مسرود و در چنین حالتی،محور ورودی عمود بر دو محور چرخش و طوقه است.
ژیروسکوپ های انتگرالی:درین نوع،عامل اصلی مقاومت در برابر دوران طوقه مجموعه دوار حول محور خودش نسبت به بدنه ژیروسکوپ،گشتاور ناشی از دمپینگ سیالی با لزجت بالا است وبرای اندازه گیری جابجایی دورانی بکار میرود.درین ژیروسکوپ،چون مجموعه دوار در یک سیال شناور است،اصطکاک تکیه گاه های محور خروجی کاهش میابد و در نتیجه خطای ژیروسکوپ کم میشود.
ژیروسکوپ های مقید: چنانه در زیروسکوپ انتگرالی از سیال با لزجت کم و یا گاز استفاده میشود،درین صورت واکنش قابل توجهی به عنوان گشتاور ناشی از دمپینگ سیال نداریم و تنها عاملی که سعی میکند از خارج شدن طوقه از وضعیت اولیه جلوگیری کند،واکنش اینرسی مجموعه دوار است.به چنین ژیروسکوپ هایی،ژیروسکوپ مقید میگویند.
تقسیم بندی ژیروسکوپ ها
علاوه بر تقسیم بندی بر حسب تعداد درجات آزادی،ژیروسکوپ ها را میتوان بر حسب نوع کاربرد نیز تقسیم بندی نمود.براین مبنا،ژیروسکوپ ها به چهار رده تقسیم میشوند.
ژیروسکوپ هایی که در بخش هدایت و ناوبری کاربرد دارند:
وظیفه اصلی این ژیروسکوپ ها،ایجاد امتداد هایی معین در فضای اینرسی است.این نوع ژیروسکوپ ها،بسیار دقیق بوده و توانایی حس کنندگی بالایی دارند.خطای آنها کم بوده و بیشتر در هواپیما ها،بالگردها،فضا پیماهاو موشک های دوربرد به کار میرود.
ژیروسکوپ هایی که در بخش پایداری و کنترل بکار میرود:
وظیفه این نوع ژیروسکوپ ها،حس کردن و کنترل حرکات زاویه ای است.این ژیروسکوپ ها نیاز به دقت های بکار رفته در ژیروسکوپ های نوع۴-۱ را ندارد.این نوع ژیروسکوپ ها در هواپیماها و موشک ها بکار میرود که البته وظیفه آنها نسبت به ژیروسکوپ های هدایت و ناوبری متفاوت است.
ژیروسکوپ هایی که در درگیری،هدف یابی و در پاییداری و کنترل آنتن وسائل فضایی بکار میروند:
این نوع ژیروسکوپ،در موشک هایی که صفحه رادار آنها روی هدف قفل میشود و به این ترتیب،موشک را تا رسیدن به هدف هدایت میکند،کاربرد دارد.
ژیروسکوپ هایی که برای تجزیه تحلیل اطلاعات پروازی(در حین پرواز یا پس از آن)بکار میرود.
۵-انواع ژیروسکوپ
ژیروسکوپ های DTG
این ژیروسکوپ که بر اساس اندازه حرکت زاویه ای عمل میکند،تقریبا در سال ۱۹۶۰ ابداع شد.درین ژیروسکوپ،عامل اصلی دوران،یک موتور الکتریکی است که محور دوار آن توسط زوج میله دیگری با خاصیت فنر پیچشی دارند-به طوقه متصل شده است.خود طوقه نیز توسط زوج میله دیگری با خاصیت فنرپیچشی به روتور-که بر خلاف انواع پیشین در قسمت بیرونی طوقه قرار دارد-متصل است.خاصیت این دو زوج میله های فنری این است که در یک سرعت خاص از دوران-که به آن حالت تشدید میگویند-عملکرد آنها به گونه ای است که دستگاه مانند یک ژیروسکوپ روتور آزاد عمل میکند.این ژیروسکوپ ها از نظر ابعاد بسیار کوچک و سبک هستند.
۵-۲-ژیروسکوپ های لیزری:
این ژیروسکوپ،بر خلاف ژیروسکوپ های قبلی دارای هیچ جسم تحرکی که ایجاد اندازه حرکت خطی یا زاویه ای کند نیست.لکن از آنجا که کاربرد آن شبیه ژیروسکوپ های معمولی برای اندازه گیری دوران است،آن را در زمره ژیروسکوپ های رده بندی میکنند.درین ژیروسکوپ از دو پرتو نورلیزر در یک مسیر بسته و در دو جهت مخالف استفاده میشود.نخستین نمونه تجاری آن در هواپیماهای بوئینگ ۷۵۷-۷۵۶و ایرباس۳۱۰ بکار رفته است.مزیت آن،درقابلیت اطمینان بیشتر،دامنه دینامیکی وسیع ترو مقاومت خوب در مقابل شتاب های زیاد است.
۵-۳-ژیروسکوپ های فیبر نوری:
این ژیروسکوپ ، تحققآخرین اندیشه های بشردر ساخت ژیروسکوپ است.چراکه در نوع خود کوچک بوده و بطور آنی روشن میشود،عمر طولانی دارد،احتیاجی به خدمات نگهداری نداشته و ارزان است.همچنین احتیاج به سامانه تعلیق طوقه ای ندارند.مبنای عملکرد این ژیروسکوپ،شبیه ژیروسکوپ لیزری است،با این تفاوت که در آن به جای لیزر از یک نور پولاریزه استفاده میشود.این فناوری در اواسط دهه ی ۱۹۷۰ در دانشگاه یوتای آمریکا ابداع شد.
ژیروسکوپ دیاپازونی:
نوع دیگری از ژیروسکوپ هاکه بر اساس اندازه حرکت خطی عمل میکند-از سامانه حفظ تعادل برخی حشرات الهام گرفته شده است.این حشرات با استفاده از دو عضو غضروفی مرتعش کوچک که در طرفین بدنشان قرار دارد-تعادل خود را حفظ میکنند.ژیروسکوپی که براین مبنا ساخته شده است،به آن ژیروسکوپ دیاپازونی یا ژیروسکوپ ارتعاشی میگویند.روی پایه اصلی این ژیروسکوپ،دو شاخک فلزی (شبیه دیاپازون) قرار دارد که توسط آهنربای الکتریکی به نوسان در می آید.این نوسانات در جهت عکس یکدیگر است یعنی یا از هم دور میشود یا بهم نزدیک میشوند.در اثر این دو حرکت،هر ذره مادی از شاخک ها،دارای مولفه شتاب کوریولیس خواهد شد که راستای این شتاب در امتداد محور xاست.
دیدگاه (1)
من دو عدد ژیرسکوب برای پایداری موتور سیکلت میخواستم چه قیمت در میاید
شماره واتس آپ من ۰۹۳۳۵۹۲۴۱۴۰
یک دیدگاه بنویسید